Loading...

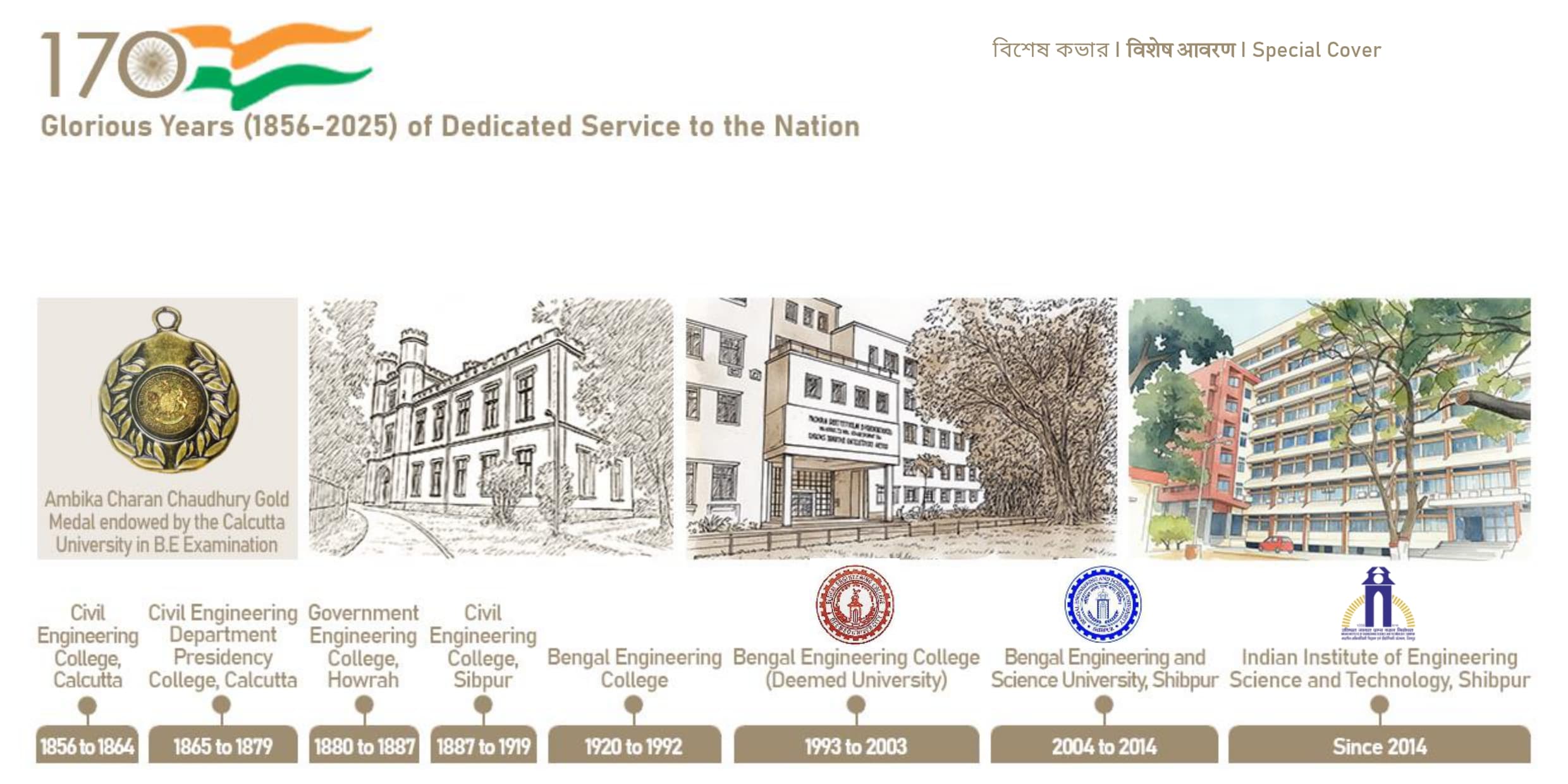
ভারতীয় প্রকৌশল বিজ্ঞান এবং প্রযুক্তিবিদ্যা প্রতিষ্ঠান, শিবপুরभारतीय अभियांत्रिकी विज्ञान एवं प्रौद्योगिकी संस्थान, शिवपुरINDIAN INSTITUTE OF ENGINEERING SCIENCE AND TECHNOLOGY, SHIBPURErstwhile B.E. College, Estd. 1856An Institute of National Importance under Ministry of Education, Government of India

Glorious Years (1856-2025) of Dedicated Service to the Nation